
Robot Pengikut Objek
Andrean Budi Kencana1, Arif Fajar Nugroho2, Muhummad Tauhid Daffa3, Uli Ajni Khati4, Samuel Beta Kuntarjo 5
Email : 1 andreanbudikencana@gmail.com , 2arifajarn16@gmail.com , 3daffawijaya92@gmail.com , 4uliajnikhati25@gmail.com , 5sambetak2@gmail.com
Jurusan Teknik Elektro, Politeknik Negeri Semarang
Jln. Prof. H. Sudarto, S.H., Tembalang, Semarang, Jawa Tengah, Indonesia. 50275.
Telp. (024)7473417, Website :www.polines.ac.id, email : sekretariat@polines.ac.id
Abstrak - Robot Pengikut Objek Berbasis Arduino merupakan Penerapan teknologi di bidang robotika telah banyak dimanfaatkan oleh kalangan industri di dunia kerja dalam rangka meningkatkan efisiensi dan efektivitas berbagai aktivitas kerja manusia. Sebuah mobile robot dibuat agar dapat mengikuti pergerakan objek. Sistem yang dirancang menggunakan Arduino mampu mengolah data secara cepat. Sistem dirancang menggunakan Joystick, Sensor Ultrasonik HCSR 04 sebagai masukan dan Driver Motor, LCD, sebagai luaran.
Kata kunci - Object Follower Robot, HCSR 04, Joystick, Arduino, 16x2 LCD.
Abstract - The Arduino-based Object Follower Robot is the application of technology in the field of robotics that has been widely used by industries in the world of work in order to increase the efficiency and effectiveness of various human work activities. A mobile robot is made to follow the movement of objects. The system designed using Arduino is able to process data quickly. The system is designed using a Joystick, Sensor Ultrasonic HCSR 04 as input and Motor Driver, LCD, as output.
Keywords - Object Follower Robot, HCSR 04, Joystick, Arduino, 16x2 LCD.
I. PENDAHULUAN
1.1 Latar Belakang
Dalam kehidupan sehari–hari manusia tidak lepas dari berbagai macam aktivitas. Sebagian besar kapasitas tangan kita, baik secara jumlah maupunberatnya. Namun jika barang-barang tersebut berukuran besar dan memiliki massa yang cukup berat maka kita akan sulit membawanya. Lebih jauh lagi, kegiatan ini akan semakin memakan tenaga jika jarak yang harus di tempuh ketika membawa barang-barang tersebut cukup jauh. Aktivitas ini juga akan sulit di lakukan oleh penyandang stabilitas.
Di sisi lain, teknologi di era modern ini selalu berkembang seiring dengan berjalannya waktu. Perkembangan teknologi yang pesat ini membawa banyak perubahan terhadap kehidupan sehari-hari. Adanya teknologi dikarenakan untuk membantu memudahkan pekerjaan sehari-hari manusia. Perkembangan teknologi ini terjadi di semua bidang. Mulai dari bidang industri, transportasi, militer, hingga teknologi pada kehidupan sehari-hari. Pada bidang robotic itu sendiri, saat ini sudah banyak penelitian yang di lakukan. Contohnya adalah robot beroda.
Perkembangan teknologi robot tersebut dapat menjadi salah satu solusi yang cukup baik untuk mengatasi permasalahan yang terjadi ketika kita membawa barang-barang yang melebihi kapasistas tangan kita. Dengan teknologi robot tersebut, barang-barang yang berada di luar kapasitas tangan bisa kita letakkan di atas robot yang bergerak mengikuti kita. Dalam hal ini dibutuhkan sebuah robot yang bisa mengikuti object. Sehingga dalam penelitian ini dilakukan perancangan dan pembuatan robot pengikut objek untuk menyelesaikan permasalahan di atas.
Untuk dapat mengikuti object, dari penelitian-penelitian sebelumnya ada beberapa parameter yang digunakan. Parameter yang pertama adalah keberadaan object. Pada penelitian ini, digunakan parameter jarak karena sensor ultrasonik mudah dijumpai di pasaran dengan harga terjangkau dan komputasi yang tidak terlalu rumit untuk pengambilan data jika dibandingkan dengan kamera. Sensor ultrasonik juga memiliki keakuratan yang lebih tinggi dibandingkan dengan sensor IR.
Selain penggunaan parameter yang sesuai, object following robot juga harus menggunakan metode yang tepat. Karena jika metode yang digunakan tidak tepat maka bisa jadi respons robot terhadap object yang diikuti akan lambat. Selain itu, pergerakan robot tidak bisa smooth. Oleh karena itu, dalam penelitian ini digunakan metode PID (Proporsional, Integral, Derivative) controller untuk mengontrol sistem. PID adalah pengontrolan dengan unsur P, I dan D berupa model matematika dengan masukan Gain, Integral, Derivative. PID merupakan pengontrolan konvensional, yang merupakan bentuk matematis yang sangat baik karena dapat mengubah error menjadi nol (Nasrul, et al., 2018). PID controller memiliki berbagai kelebihan, seperti mudah digabungkan dengan metode lainnya. Metode ini juga memiliki proses komputasi yang relatif ringan sehingga diimplementasikan pada hardware dengan resource terbatas .
II. TINJAUAN PUSTAKA
Penjelasan dan uraian teori penunjang yang digunakan dalam membuat alat ini diperlukan untuk mempermudah pemahaman tentang cara kerja rangkaian maupun dasardasar perencanaan pembuatan alat.
2.1 Arduino Nano
Arduino Nano adalah board microcontroller yang berukuran kecil, lengkap, dan salah satu board yang menggunakan IC ATmega328P (Arduino Nano V3). Ini memiliki fungsi yang kurang lebih sama dengan Arduino Uno, tetapi dalam packaging yang berbeda. Arduino Nano ini bekerja dengan kabel USB Mini-B dan bukan yang standar. Arduino Nano dapat diaktifkan melalui koneksi USB Mini-B, atau melalui catu daya eksternal dengan tegangan belum teregulasi antara 6-20 Volt yang dihubungkan melalui pin 30 atau pin VIN, atau melalui catu daya eksternal dengan tegangan teregulasi 5 volt melalui pin 27 atau pin 5V. Sumber daya akan secara otomatis dipilih dari sumber tegangan yang lebih tinggi. Chip FTDI FT232L pada Arduino Nano akan aktif apabila memperoleh daya melalui USB, ketika Arduino Nano diberikan daya dari luar (Non-USB) maka Chip FTDI tidak aktif dan pin 3.3V pun tidak tersedia (tidak mengeluarkan tegangan), sedangkan LED TX dan RX pun berkedip apabila pin digital 0 dan 1 berada pada posisi HIGH.
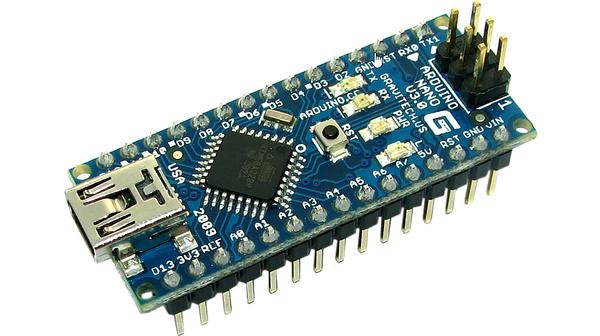
Gambar 2.1 Arduino Nano
Spesifikasi Arduino Nano
Berikut ini adalah Spesifikasi yang dimiliki oleh Arduino Nano:
MikrokontrolerAtmel ATmega168 atau ATmega328
5 V Tegangan Operasi
7-12VInput Voltage (disarankan)
6-20VInput Voltage (limit)
Pin Digital I/O14 (6 pin digunakan sebagai output PWM)
8 Pin Input Analog
40 mA Arus DC per pin I/O
Flash Memory16KB (ATmega168) atau 32KB (ATmega328) 2KB digunakan oleh Bootloader
1 KbyteSRAM (ATmega168) atau 2 Kbyte(ATmega328)
512 ByteEEPROM (ATmega168) atau 1Kbyte (ATmega328)
16 MHz Clock Speed
Ukuran1.85cm x 4.3cm
Konfigurasi pin Arduino Nano. Arduino Nano memiliki 30 Pin. Berikut Konfigurasi pin Arduino Nano:
VCC merupakan pin yang berfungsi sebagai pin masukan catu daya digital.
GND merupakan pin ground untuk catu daya digital.
AREF merupakan Referensi tegangan untuk input analog. Digunakan dengan fungsi analogReference().
RESET merupakan Jalur LOW ini digunakan untuk me-reset (menghidupkan ulang) mikrokontroler. Biasanya digunakan untuk menambahkan tombol reset pada Shields yang menghalangi papan utama Arduino
Serial RX (0) merupakan pin sebagai penerima TTL data serial.
Serial TX (1) merupakan pin sebagai pengirim TT data serial.
External Interrupt (Interupsi Eksternal) merupakan pin yang dapat dikonfigurasi untuk memicu sebuah interupsi pada nilai yang rendah, meningkat atau menurun, atau perubahan nilai.
2.2 Driver Motor L298N
Driver motor L298N merupakan module driver motor DC yang paling banyak digunakan atau dipakai di dunia elektronika yang difungsikan untuk mengontrol kecepatan serta arah perputaran motor DC. IC L298 merupakan sebuah IC tipe H-bridge yang mampu mengendalikan beban-beban induktif seperti relay, solenoid, motor DC dan motor stepper. Pada IC L298 terdiri dari transistor-transistor logik (TTL) dengan gerbang nand yang berfungsi untuk memudahkan dalam menentukan arah putaran suatu motor dc maupun motor stepper. Kelebihan akan modul driver motor L298N ini yaitu dalam hal kepresisian dalam mengontrol motor sehingga motor lebih mudah untuk dikontrol.

Gambar 2.2 Driver motor L298N
Spesifikasi dari Modul Driver Motor L298N
Menggunakan IC L298N (Double H bridge Drive Chip)
Tegangan minimal untuk masukan power antara 5V-35V
Tegangan operasional : 5V
Arus untuk masukan antara 0-36mA
Arus maksimal untuk keluaran per Output A maupun B yaitu 2A
Daya maksimal yaitu 25W
Dimensi modul yaitu 43 x 43 x 26mm
Berat : 26g
2.4 Sensor Ultrasonic HC-SR04
Sensor jenis ini adalah modul elektronik yang mendeteksi sebuah objek menggunakan suara. Sensor ultrasonic terdiri dari sebuah transmitter (Pemancar) dan sebuah receiver (penerima). Transmitter berfungsi untuk memancarkan sebuah gelombang suara kearah depan. Jika ada sebuah objek didepan transmitter maka sinyal tersebut akan memantul kembali ke Receiver. Fungsi sensor ultrasonic adalah mendeteksi benda atau objek di hadapan sensor. Penerapannya banyak dipakai pada robot pemadam api dan robot obstacle lainnya. Salah satu sensor yang paling sering digunakan adalah sensor ultrasonic tipe HC SR04. HC-SR04 merupakan sensor ultrasonik yang dapat digunakan untuk mengukur jarak antara penghalang dan sensor. Sensor ini mirip dengan sensor PING namun berbeda dalam jumlah pin serta spesifikasinya. Konfigurasi pin dan tampilan sensor HC-SR04 diperlihatkan pada Gambar dibawah ini :

Gambar 2.3 Sensor Ultrasonik HCSR 04
2.4 Joystick
Joystick merupakan komponen yang berbentuk seperti tuas atau tongkat yang dapat digerakan ke berbagai arah untuk mendapatkan posisi yang diinginkan. pada umumnya kodul ini memiliki 2 axis yaitu axis X dan axis Y dan 1 push button. pengaplikasian modul ini banyak dijumpai pada joystick game Playstation, X-Box, pengendali servo motor, kursi motor dan lain-lain. modul ini yang banyak dipakai yaitu tipe bi-axial. tipe joystick ini merupaka tipe yang sanma dengan yang di gunakan pada gagang kendali analog pada konsol sony Playstation, X-Box. Joystik yang kita pakai yaitu tipe joystick bi-axial.

Gambar 2.4 Joystick
2.5 LCD (Liquid Crystal Display)
LCD (Liquid Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik
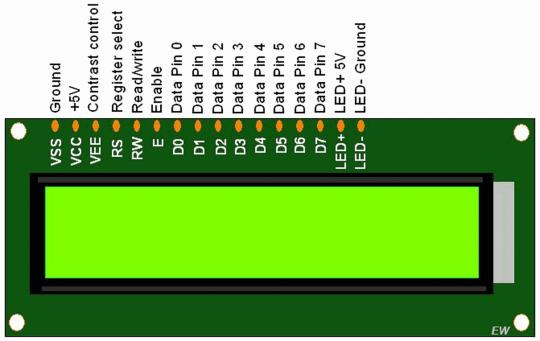
Gambar 2.5 Konfigurasi Pin LCD 16x2
Adapun fitur yang disajikan dalam LCD ini adalah:
- Terdiri dari 16 karakter dan 2 baris.
- Mempunyai 192 karakter tersimpan.
- Terdapat karakter generator terprogram.
- Dapat dialamati dengan mode 4-bit dan 8-bit.
- Dilengkapi dengan back light.
Spesifikasi Kaki LCD 16 x 2
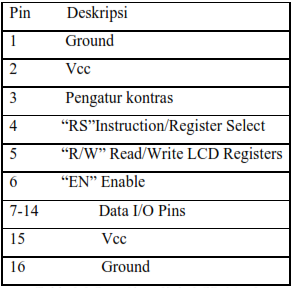
Table 2.1 Spesifikasi Kaki LCD 16 x 2
2.6 Modul Step Down MP2307
Modul Step Down MP2307 adalah sebuah modul yang dapat menurunkan tegangan listrik DC ke tegangan yang dibutuhkan dalam rangkaian. Modul Step Down MP2307 memiliki dimensi yang cukup kecil sehingga dapat menghemat ruang untuk menenpatkan komponen yang lain. Berikut adalah spesifikasi Modul Step Down MP2307:
- Tegangan masukan : 4.75 - 23V
- Tegangan keluaran : 1 - 17V
- Arus keluaran : kurang dari 3A
- Arus stabil : 1.8A
- Efisiensi maksimum : 96%
- Regulasi Tegangan : ±2.5%
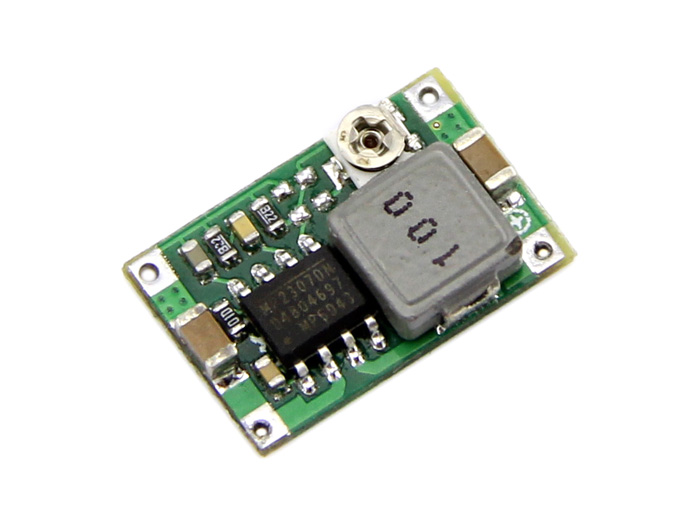
Gambar 2.6 Modul Step Down MP2307
III. PERANCANGAN ALAT
3.1 Alat yang diperlukan antara lain:
- PCB
- Akrilik
- Solder
- Kabel USB
- Tang potong
- Bor dan Mata Bor
- Setrika
- Laptop
3.2 Bahan yang diperlukan antara lain:
- Sensor Ultrasonik HCSR 04
- Arduino Nano
- Driver Motor L239N
- Joystick
- LCD 16x2
- Kabel Jumper
3.3 Blok Diagram
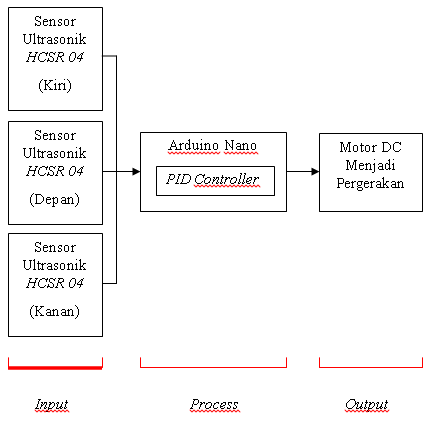
Gambar 3.1 Diagram Blok Robot Pengikut Objek
Berikut keterangan singkat dari gambar blok diagram di atas:
1. Sensor Ultrasonik HCSR 04 Fungsi dari sensor ini adalah untuk mendeteksi dan mengetahui jarak object dari robot
2. Arduino Nano sebagai mikrokontroler.
3. Motor DC sebagai aktuator
4. LCD 16x2 sebagai penampil data output berupa pengukuran jarak
3.4 Gambar Rangkaian

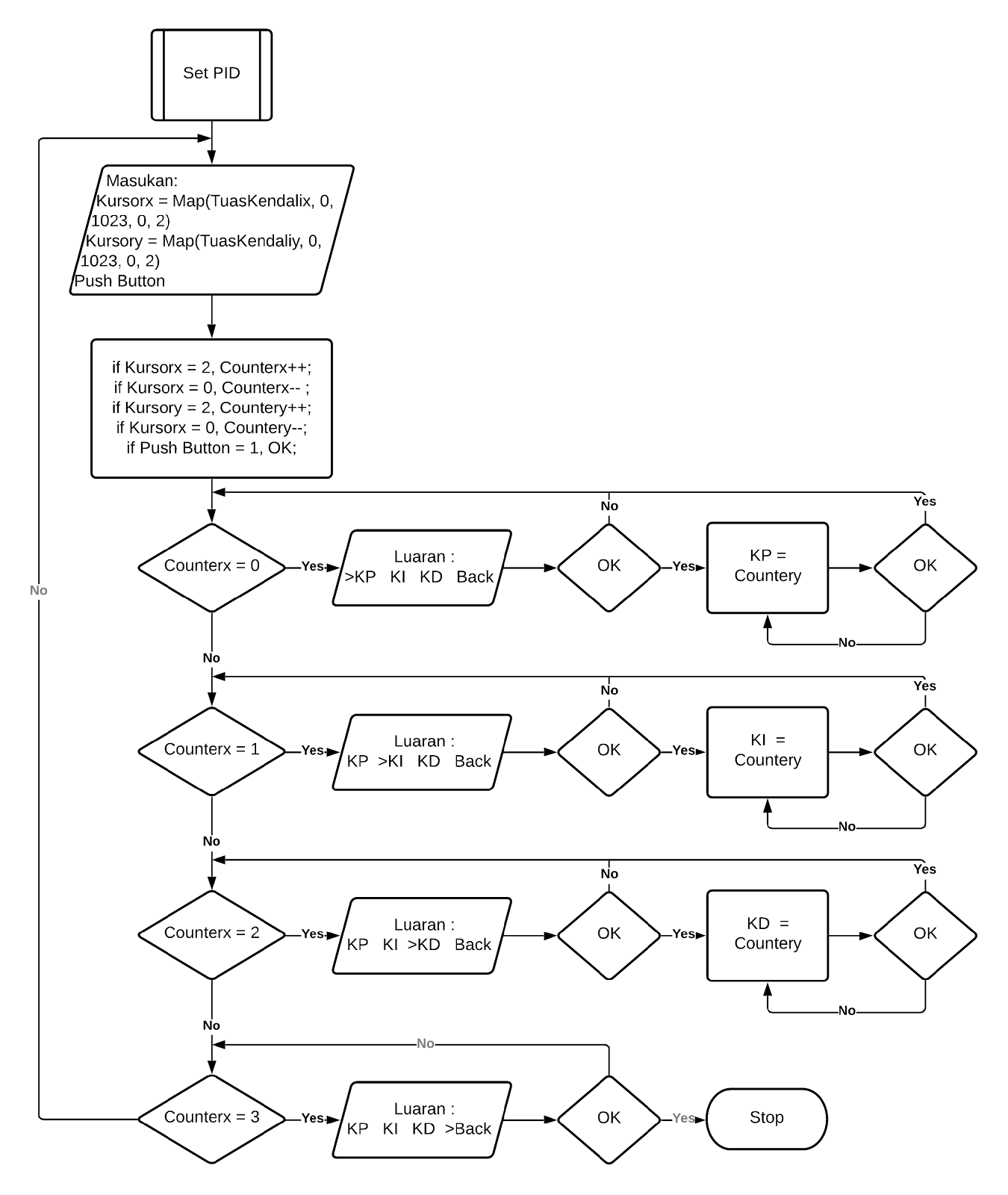
3.5 Diagram Alir



3.6 Pembuatan Alat
Dalam pembuatan alat ini dapat dilakukan dengan beberapa tahap, yaitu:
- Membuat perencanaan Bagan dari alat tersebut.
- Membuat diagram pengawatan.
- Menyusun rangkaian sesuai diagram pengawatan.
- Membuat program untuk Arduino.
- Pembuatan kerangka alat.
- Pemasangan rangkaian pada kerangka alat.
- Pengujian akhir pada kerangka alat
IV. CARA KERJA ALAT
Robot akan melakukan scanning objek dengan cara berputar , objek yang dapat di deteksi adalah objek dengan jarak maksimal 30 cm. Ketika objek sudah terdeteksi robot akan mengikuti objek tersebut. Mekanisme pengikutan objek tersebut adalah dengan menggunakan kontrol PID pada sensor ultrasonik bagian depan dengan output kecepatan maju atau mundur motor DC. Untuk menjaga objek agar tetap terdeteksi oleh sensor ultrasonik bagian tengah di gunakan 2 sensor ultrasonik pada bagian depan sebelah kanan dan kiri robot. Apabila jarak pada sensor kanan lebih kecil daripada jarak sensor tengah maka robot akan berputar ke arah kanan dan jika jarak pada sensor kiri lebih besar daripada jarak sensor tengah maka robot akan berputar ke arah kiri.
V. PERANCANGAN MEKANIK

Gambar 5.1 Alat Tampak Dari Depan

Gambar 5.2 Tampak Dari Atas


Gambar 5.3 Alat Tampak Dari Samping
VI. PENGUJIAN ALAT
Pengujian dilakukan untuk mengetahui kinerja dari alat yang dibuat. Pengujian ini terdiri dari pengujian pembacaan sensor jarak, pengujian respon pergerakan motor. Pengujian pembacaan sensor jarak bertujuan untuk mengetahui akurasi sensor jarak yang digunakan. Pengujian dilakukan dengan cara membandingkan hasil pembacaan sensor dengan jarak sebenarnya. Pengujian respon pergerakan motor bertujuan untuk memastikan bahwa arah putaran motor sesuai dengan logika yang diberikan oleh controller. Pengujian ini dilakukan dengan cara memberikan logika pada motor driver dan melihat keluarannya apakah sudah sesuai. Kemudian pengujian ini dilakukan untuk mengetahui fungsionalitas robot secara keseluruhan. Fungsionalitas ini meliputi kemampuan robot untuk mengikuti object di depannya. Baik itu object yang bergerak lurus maupun berbelok. Pengujian ini dilakukan dengan cara menggerakkan object di depan robot dan melihat pergerakan robot apakah bisa mengikuti object tersebut atau tidak.
VII. KESIMPULAN DAN SARAN
7.1 Kesimpulan
Dari hasil penelitian yang telah dilakukan dapat disimpulkan sebagai berikut:
- Robot pengikut objek ini di rancang dengan menggunakan sensor ultrasonik HCSR 04, Arduino Nano, Joystick, Driver Motor L239N dan LCD 16x2.
- Berdasarkan hasil pengujian, robot secara fungsional bisa mengikuti object yang bergerak maju, belok kanan, belok kiri, dan mundur.
7.2 Saran
- Untuk proyek selanjutnya dapat dikembangkan dengan memodifikasi atau mengubah sensor ultrasonik dengan sensor yang lebih akurat lagi dalam pendeteksian objek.
- Untuk meningkatkan reliabilitas (konsistensi) robot perlu digunakan motor DC yang lebih bagus.
DAFTAR PUSTAKA
https://www.nyebarilmu.com/tutorial-arduino-mengakses-driver-motor-l298n/
https://journal.trunojoyo.ac.id/jim/article/view/1651
https://candraherdianto.blogspot.com/2016/12/project-simple-human-following-robot.html?m=1
https://www.belajaronline.net/2020/07/pengertian-fungsi-dan-cara-kerja-transformator-step-down.html
LAMPIRAN
Diagram Alir (klik di sini)
Diagram Blok (klik di sini)
Skema Rangkaian (klik di sini)
Jurnal (klik di sini)
Video Presentasi (klik di sini)
PPT (klik di sini)
Video (klik di sini)
Program (klik di sini)
BIODATA PENULIS
1. Andrean Budi Kencana; Cilacap 8 Juni 2000; MI Ma'arif 01 Gentasari; SMPN 4 Kroya; SMAN 1 Maos; Politeknik Negeri Semarang; andreanbudikencana@gmail.com
2. Arif Fajar Nugroho; Boyolali 16 Desember 1999; SDN Ngesrep Semarang; SMPN 12 Semarang; MAN 1 Kota Semarang; Politeknik Negeri Semarang; arifajarn16@gmail.com
3. Muhammad Tauhid Daffa' Wijaya; Semarang 24 Mei 1999; SMKN 7 SEMARANG; Politeknik Negeri Semarang; daffawijaya92@gmail.com
4. Uli Ajni Khati; Brebes, 25 Februari 2000; SDN Negarayu 02; SMP Negeri 1 Tonjong; SMK Negeri 1 Tonjong; Politeknik Negeri Semarang; uliajnikhati25@gmail.com
0 komentar:
Posting Komentar